您现在的位置是:首页 >生活 > 2020-11-25 09:26:27 来源:
研究人员将计算机视觉和不确定性纳入机器人假肢的AI中
研究人员已经开发出可以与现有硬件集成的新软件,从而使使用机器人假肢或外骨骼的人们能够以更安全,更自然的方式在不同类型的地形上行走。新框架将计算机视觉整合到假肢腿部控制中,并包括强大的人工智能(AI)算法,该算法可使软件更好地解决不确定性问题。
“下肢机器人假肢需要根据用户所走的地形来执行不同的行为,”有关这项工作的论文的合著者,北卡罗来纳州立大学电气与计算机工程副教授埃德加·洛巴顿说。“我们创建的框架允许机器人假肢中的AI预测用户将要踏入的地形的类型,量化与该预测相关的不确定性,然后将该不确定性纳入其决策。”
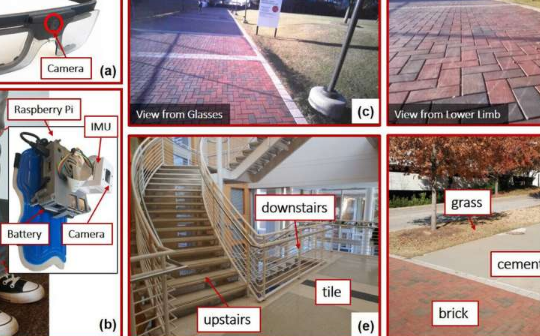
研究人员专注于区分需要调整机器人假肢行为的六个不同地形:瓷砖,砖块,混凝土,草,“楼上”和“楼下”。
“如果不确定性程度过高,则不会迫使AI做出可疑的决定-它可能会通知用户它对自己的预测没有足够的信心采取行动,或者可能默认为'安全“模式”,该论文的主要作者,最近获得博士学位的钟伯冠说。毕业于数控州。
新的“环境上下文”框架结合了硬件和软件元素。研究人员设计了该框架,使其可用于任何下肢机器人外骨骼或机器人假肢设备,但还需要另外一个硬件:摄像头。在他们的研究中,研究人员使用了戴在眼镜上的照相机和安装在下肢假体本身上的照相机。研究人员评估了AI如何分别和同时使用两种相机的计算机视觉数据。
该论文的合著者Helen Huang说:“将计算机视觉集成到可穿戴机器人的控制软件中是令人兴奋的新研究领域。” “我们发现同时使用两个摄像头效果很好,但是需要大量的计算能力,并且可能会抑制成本。但是,我们还发现,仅使用安装在下肢上的摄像头效果很好,尤其是对于近期预测而言,例如下一两步的地形。” Huang是北卡罗莱纳州立大学和北卡罗来纳大学教堂山分校联合生物医学工程系的杰克逊家族生物医学工程杰出教授。
但是,最重要的进步是AI本身。
Lobaton说:“我们提出了一种更好的方法来教深度学习系统如何评估和量化不确定性,从而使系统将不确定性纳入其决策中。” “这当然与机器人修复术有关,但是我们在这里的工作可以应用于任何类型的深度学习系统。”
为了训练AI系统,研究人员将摄像机连接到身体强壮的人,然后这些人走过各种室内和室外环境。然后,研究人员通过让下肢截肢者在穿越相同环境时佩戴相机来进行概念验证评估。
Lobaton说:“我们发现该模型可以适当地转移,因此该系统可以处理来自不同人群的对象。” “这意味着即使认为AI由一组人训练并且被其他人使用,该AI也能很好地工作。”
但是,新框架尚未在机器人设备中进行测试。
Huang说:“我们很高兴将框架整合到用于工作的机器人假肢的控制系统中,这是下一步。”
Zhong表示:“而且,我们还计划研究方法,使系统效率更高,所需的视觉数据输入更少,数据处理更少。”
")





")
")
")
")
")
")
")
")
")
")