您现在的位置是:首页 >生活 > 2021-04-11 19:48:34 来源:
AEye的iDar传感器将相机和激光雷达数据结合到3D点云中
许多自主驾驶系统的一个关键组成部分是激光雷达(的混成 光和 雷达),其反弹光-通常是在紫外线,可见光或近红外的形式-断对象将它们数字化以三维映射。虽然激光雷达系统非常适合识别潜在的障碍物,但它们并不总能快速发现这些障碍。例如,以每小时70英里的速度瞄准60米外的物体,如果它使汽车停在100米处,则效果不大。后处理引入了另一种延迟。
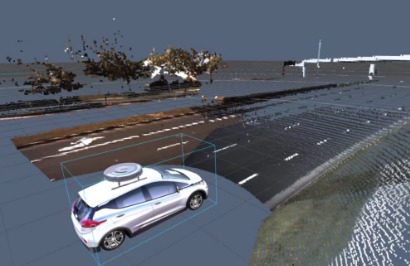
这就是为什么启动AEye的新传感器- iDar - 首先是为了速度而建造的。智能检测和测距传感器将300米的360度深度数据与相机数据合并,创建一个动态的,可操纵的点云,AEye称之为真彩色激光雷达。AEye表示,当传感器价格低于3000美元时,将于7月开始向原始设备制造商发货,它将成为市场上首款将激光雷达和相机数据机械地结合在硬件级别的产品。
“关于基于摄像头的视觉系统或基于激光雷达的传感器系统是否更好,一直在争论,”AEye的创始人兼首席执行官Luis Dussan说。“我们的答案是两者都是必需的。”
这项研究由Allan Steinhardt博士带头,他的令人印象深刻的职业生涯包括在DARPA工作,在那里他研究空间,地面和海军雷达系统,并在博思艾伦汉密尔顿担任副总裁,首席科学家。斯坦哈特还在麻省理工学院林肯实验室和康奈尔大学担任雷达搜索负责人。
Steinhardt和这家位于旧金山的公司的其他工程团队将点云数据称为“动态变音”,这是一个厚颜无耻的参考,它们包括摄像机像素和激光雷达体素。(体素代表三维空间中网格图案的值,它们是构成激光雷达传感器深度图的元素。)动态像素是AEye秘密酱的第一个成分,另一个是智力。一旦iDar生成点云,AEye的AI接管,评估周围环境以跟踪目标并标记感兴趣的对象。
如果你看一下目前存在的激光雷达系统,它们就是以固定模式运行的离散系统,”AEye参谋长Blair LaCorte在电话采访中告诉VentureBeat。“他们带来了数据,但智能没有反馈循环。”
LaCorte是航空租赁公司XoJet的前首席执行官,也是私募股权公司TPG的运营合作伙伴,该公司表示,该系统建立在数十年的激光雷达和成像系统研究基础之上。“激光雷达已经存在了50年,军方已经做了很多次迭代,”他说。“这些年来它已经变得更好,但在商业领域并没有这样做。”
iDar中激光雷达和摄像头收集的大量数据 - 除了传感器和感知层以及路径规划软件中的反馈回路 - 使系统能够感知传统传感器可能遗漏的东西。它可以识别结构最小的物体,如自行车,刹车灯或标牌,并区分两个相同颜色的物体。它能够感知环境中的背景变化,例如当孩子在走出街道之前转过头时。
“我们可以在一个[框架]中获得三个[重要]测量值:速度,加速度和减速度,”LaCorte说。“带有单独雷达和摄像头的系统必须重新进行重新询问,这会增加延迟。”
iDar系统还提供了环境映射的灵活性。通过软件API,汽车制造商可以在传感器中定制数千个嵌入式机器学习算法,以根据传感器范围内的哪些物体动态调整点云的分辨率。例如,它们可以降低天空的分辨率,同时增加行人或骑自行车的动态像素数,或者在汽车接近时将焦点锁定在建筑物上。
总而言之,AEye声称iDar系统的覆盖范围扩大了16倍,帧速率提高了10倍,比竞争对手的传感器节能8到10倍。它也是模块化的。虽然iDar使用定制设计的固态激光雷达系统,但其他组件是现成的并且“按成本制造”,LaCorte说。
“我们设计了一个带有独立传感器的商业系统,”他说。“这是更好的激光即插即用。”
AEye于2013年首次展示其激光雷达技术,于2017年6月从Kleiner Perkins,Airbus Ventures,Intel Capital等公司筹集了1600万美元。今年早些时候,AEye为大学和原始设备制造商推出了iDAR开发合作伙伴计划。
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")