您现在的位置是:首页 >市场 > 2020-11-30 09:41:37 来源:
评估和比较可自我重构的机器人系统的框架
能够自动改变形状并适应其周围环境的自重构机器人(SRR)最近在机器人研究界引起了很多兴趣。这些机器人可以具有多种有用的应用程序,因为它们可以在感知周围环境以及计划和执行适当的动作方面获得高度的自主权。尽管过去的研究已经引入了将这些机器人分类为子组的方法,但是仍然没有用于评估其性能的标准程序。
考虑到这一点,中国中山大学和新加坡科技设计大学的研究人员最近开发了一种可自我重构机器人的分类和评估(TAEV)框架。他们的研究以IEEE Access为特色,由新加坡国家机器人研究与发展计划办公室资助。
进行这项研究的研究人员之一阿卜杜拉·阿米尔·哈亚特(Abdullah Aamir Hayat)告诉TechXplore:“到目前为止,研究人员已经设计了一种定性方法来对SRR进行分类,但没有定量方法可以指导设计者,制造商和机器人用户。” “这促使我们为SRR开发一种框架和评估方法。”
在SRR中,改变形状以完成给定任务的能力主要取决于机器人采用的机制类型及其自治程度。虽然某些SRR系统是完全自治的,但其他系统则需要一定程度的手动遥控操作。
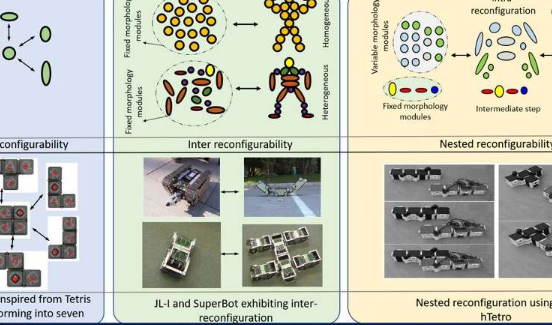
在机械方面,可以将机器人分为三大类:具有内部,内部和嵌套重新配置的机器人。内部和内部重新配置之间的区别在于,机器人可以使用的配置数量以及这些配置的规模。
内部可重新配置性涉及单个机器人模块,该模块可以在不进行任何组装或拆卸的情况下更改其形态,而内部可重新配置性涉及可以组装或拆卸的两个或多个模块。最后,由Mohan Rajesh Elara教授和Kristin L. Wood教授共同提出的嵌套重配置结合了内部重配置和内部重配置的功能。
Hayat及其同事在论文中介绍了可用于评估SRR,量化其自治程度和可用配置数量的指标。将这些指标结合起来可以创建一个TAEV框架,该框架可以指导研究人员和制造商评估其机器人系统。
")









")
")
")
")
")
")
")
")
")