您现在的位置是:首页 >要闻 > 2020-11-26 09:25:59 来源:
生物启发算法为机器人团队产生协作行为
萨里大学的研究人员最近开发出生物形态的启发自组织算法,可以产生多机器人团队结构,适应它们在移动环境中,他们的最新研究,刊登在IEEE交易认知和发展系统,由欧洲委员会的FP7计划部分资助。
萨里大学杰出主席兼首席研究员金耀初教授说:“这项研究可以追溯到我以前在形态发生机器人学上的工作,该工作将生物学形态发生基础的遗传和细胞原理应用于诸如机器人群之类的集体系统的自组织。”在研究中,告诉TechXplore。“我们的主要思想是在多细胞生物的细胞与机器人之间建立一个隐喻,包括可重构模块化机器人的模块。”
使用自然界中观察到的形态学原理来产生集体机器人行为的主要优势在于,这些原理允许机器人以“引导”,“可预测”或“可控制”的方式自我组织。但是,自组织系统(即没有集中控制的系统)通常也有许多限制。
例如,定义本地交互规则以在这些系统中生成所需的群体行为可能非常具有挑战性。换句话说,在给定一组定义的本地规则时,很难预测和控制系统的全局行为。
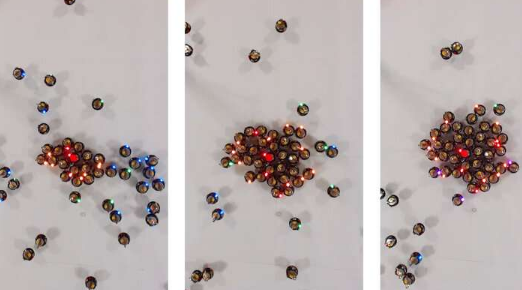
Jin和他的同事们在工作中试图通过使用简单的机器人克服这种限制,这些机器人相当基础,并且无法自我定位。将形态学原理应用于这些“极简”机器人可以实现更有效的群体行为,例如目标周围或团队的形成。
金说:“我们最近的工作与先前的研究之间的主要区别在于,我们使用了非常简单的机器人(例如,我们在实验中使用的千斤顶机器人),它们没有自我定位和定向能力。”
在生物发育中,细胞通过一种称为形态发生素的化学物质,或更具体地说是形态发生素梯度(即动物体内形态发生素浓度的变化)被引导至所需位置。形态发生梯度可以预先定义,例如在子宫(例如母体形态发生因子)中定义,也可以通过所谓的“形态发育”建立。
在他们的研究中,Jin和他的同事从一种称为生物形态发生的过程中汲取了灵感,该过程通过细胞随着生物体的发展而自身产生形态发生子。然后在自然界中将这些形态发生子用于将细胞引导至特定位置,研究人员试图复制这一原理来引导机器人并改变其群体行为。
")
")
")
")

")
")
")
")
")
")
")
")
")
")
