您现在的位置是:首页 >要闻 > 2020-11-26 09:25:57 来源:
遇见可以在水下爬行的脆弱的星形机器人
卡内基梅隆大学的研究人员最近创造了PATRICK,这是一种不受束缚的软机器人,可以人工复制脆性恒星的结构和行为,该恒星是与海星密切相关的海洋无脊椎动物。这种独特的受生物启发的机器人已发表在arXiv上的一篇论文中,该机器人可以使用由形状记忆合金(SMA)线驱动的五只腿在水下爬行。
进行这项研究的研究人员之一扎克·帕特森(Zach Patterson)告诉TechXplore表示:“这项工作是对我们实验室先前的工作的自然延伸,该工作是使用肌肉线代替电动机来创建不受束缚的软机器人。” “我们对PATRICK的灵感来自易碎的恒星,这是海星出奇的敏捷亲戚。”
Patterson和他的同事着手开发一种软机器人,该机器人可以完成水下的简单任务,但也可以增强当前对脆星及其水下爬行行为的了解。为了重现这颗脆性恒星最有效地在水下行走的能力,研究人员认为他们的机器人不应被束缚在外部硬件上,因为这将使其更自由地走动。
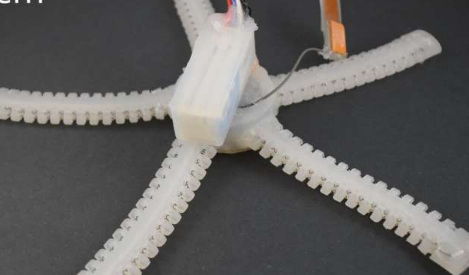
他们开发的机器人PATRICK有五个由SMA线圈驱动的肢体。SMA是一种具有许多有利特性的金属,包括室温下的高柔韧性和加热时的独特性能。实际上,当对其施加电流时,SMA金属会迅速升温并恢复为过去获得的形状。
帕特森说:“我们将这些可变形的线圈用作一种'肌肉',使机器人的腿向所需的方向弯曲。机器人主要由硅树脂制成,具有很高的柔韧性和防水性。为了控制PATRICK的运动,我们开发了几种运动原语:特定的形状变化模式在使机器人整体运动的四肢之间协调一致。”
除了具有高度的灵活性外,Patterson及其同事还希望他们的机器人能够感知周围的环境,并选择自主移动的方向。为了实现这一目标,他们开发了一种框架,该框架允许机器人通过无线通信与水下设备进行通信。这为PATRICK提供了额外的功能,这些功能不仅仅依赖于构成其主体的相对便宜的硬件组件,还使其能够自主感知其环境并执行计算。
")
")
")
")

")
")
")
")
")
")
")
")
")
")
