您现在的位置是:首页 >要闻 > 2020-12-02 17:11:15 来源:
未来的软机器人可能依赖于导电感知损坏
导读 过去,机器人只能在工厂进行繁重的工作或进行精细的工作。现在,波士顿动力公司灵活的四足机器人Spot可供公司租借以执行各种实际工作,这标
过去,机器人只能在工厂进行繁重的工作或进行精细的工作。现在,波士顿动力公司灵活的四足机器人Spot可供公司租借以执行各种实际工作,这标志着近年来人机之间的普通交互已经变得多么普遍。
尽管Spot具有通用性和鲁棒性,但它却被社会视为传统机器人,即金属和硬塑料的混合物。许多研究人员坚信, 能够与人进行安全的物理交互的软机器人(例如,通过抓握和移动物体来提供居家帮助)将与硬机器人一起为未来创造条件。
柔软的机器人技术和可穿戴计算机,这两种对于人类交互而言都是安全的技术,它们将需要新型的材料,这些材料必须柔软,可拉伸,并具有多种功能。我和我在卡内基梅隆大学软机械实验室的同事开发了这些多功能材料。与 合作者一起,我们最近开发了一种这样的材料,它独特地结合了金属,软橡胶和形状记忆材料的特性。
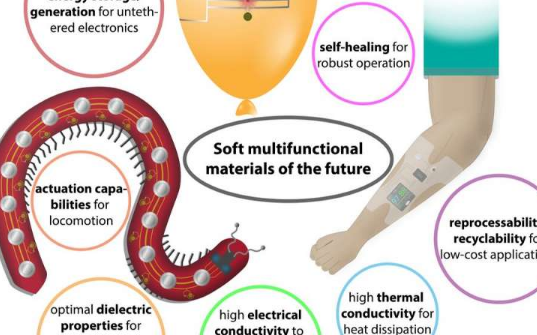
这些柔软的多功能材料(我们称为它们)可以导电,检测损坏并自我修复。它们还可以感应触摸并响应电刺激(例如人造肌肉)改变其形状和刚度。在许多方面,这都是开创性的研究人员Kaushik Bhattacharya和Richard James所说的:“材料就是机器。”
使材料智能化
物质就是机器的想法可以体现在体现智能的概念中。该术语通常用于描述互连的材料系统,例如膝盖中的肌腱。跑步时,每次脚踩到地面时,肌腱都可以拉伸和放松以适应,而无需任何神经控制。
")









")
")
")
")
")
")
")
")
")