您现在的位置是:首页 >要闻 > 2020-12-02 17:11:14 来源:
人类如何走向智能微型机器人
导读 Paul Scherrer研究所PSI和ETH Zurich的研究人员已经开发出可以执行不同动作的微机。首先对微型机器人组件中的纳米磁铁进行磁编程,然后通
Paul Scherrer研究所PSI和ETH Zurich的研究人员已经开发出可以执行不同动作的微机。首先对微型机器人组件中的纳米磁铁进行磁编程,然后通过磁场控制各种运动。这样的机器,只有几十微米宽,可以用于例如人体中的小型操作。研究人员现在将其结果发表在科学杂志《自然》上。
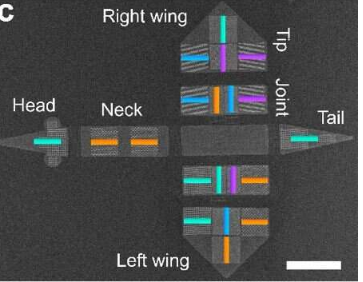
该机器人的尺寸仅为几微米,让人联想到日本折纸艺术-折纸制成的纸鸟。但是,与纸质结构不同,机器人在没有可见力的情况下仿佛靠魔术般运动。它拍打翅膀或弯曲脖子并缩回头部。磁性使这些动作全部成为可能。
Paul Scherrer研究所PSI和ETH Zurich的研究人员已经使用包含小型纳米磁铁的材料组装了微型机器。可以对这些纳米磁铁进行编程,使其呈现特定的磁性方向。然后,将编程的纳米磁铁暴露在磁场中时,特定的力就会作用在它们上。如果这些磁体位于柔性组件中,则作用在其上的力会导致组件移动。
对纳米磁铁进行编程
纳米磁铁可以一次又一次地编程。该重新编程导致不同的力,并且导致新的运动。
为了建造微型机器人,研究人员在氮化硅薄板上制造了钴磁体阵列。用这种材料制成的鸟可以执行各种动作,例如拍打,盘旋,转弯或侧滑。
")









")
")
")
")
")
")
")
")
")