您现在的位置是:首页 >要闻 > 2020-12-04 08:47:18 来源:
改进的机器人远程控制如何
有时,您需要将人类的知识和技能带到危险或难以接近的地方。名为“预测头像控制和反馈(PACOF)”的项目正在创建一个机器人系统,使机器人操作员可以像机器人一样体验该位置。代表特温特大学EEMCS系的三个不同学科的三位研究人员正在该项目中开展合作。
头像
Douwe Dresscher博士,Felix Schwenninger博士和Gwenn Englebienne博士正在建造的“化身”有点像同名电影中的蓝色人形生物。Dresscher说:“像这些虚构人物一样,我们正在研究类似的控制系统,该系统将使操作员感觉自己已取代了机器人。”
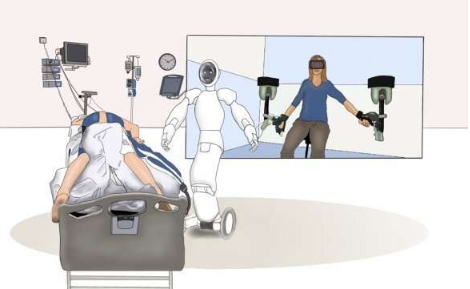
挪威已经在开发用于家庭护理的机器人,但是它们还没有像现在这样个性化。在这个人口稀少的国家,化身可以让护理人员通过机器人看到患者并与患者互动,从而帮助弥合巨大的距离。这些化身还可用于危险工作,例如在鹿特丹港装卸油轮。德莱舍说:“危险物质必须由具有适当专业知识的操作员来处理。使用化身,您就可以向油轮获得必要的技能,而不必危害人员。”
这个怎么运作
要使其正常工作,必须发生三件事。首先,运营商必须与外界完全隔离。其次,他们必须经历现实的刺激才能创建虚拟世界。Dresscher说:“这不仅意味着通过VR眼镜投射的图像和声音,而且还包括气味,温度和当您推向物体时遇到的反压之类的东西。” “我们希望操作员感到自己在其他地方;必须感觉到机器人是他或她自己的身体。” 最后,控件必须直观,并且必须在化身中产生几乎相同的动作。
延迟
在PACOF项目中,研究人员将专注于后者的挑战。Dresscher说:“我们可以给操作员提供他们可以控制的机械臂,但是由于网络的延迟,当操作员进行移动时,在复制机器人之前还会有一个延迟。” 同样,机器人提供的反馈也需要一些时间才能到达操作员。这使得控制这样的系统更加尴尬,从而限制了您可以使用该系统执行的操作。
预测未来
可以通过让机器人预测操作员的工作来解决延迟问题。甚至可以在机器人从操作员接收信号之前对其进行建模以执行运动。“与此同时,我们还将尝试预测机器人的环境将如何响应并将其整合到操作员的反馈中,这样他们就不会注意到延迟。这也意味着我们必须考虑如果机器人做出反应会发生什么情况。错误的预测:机器人如何解决错误,操作员将需要什么样的反馈?” 德莱彻说。
")


")


")



")
")
")
")
")
")
")
")
")