您现在的位置是:首页 >要闻 > 2020-12-07 15:45:42 来源:
控制蛇形机器人实现高机动性和灵活性
导读 像蛇一样的铰接式移动机器人可以利用其细长的身体进入狭窄的空间并爬上障碍物,并且对于检查狭窄的空间以及在灾难现场进行搜索和救援操作非
像蛇一样的铰接式移动机器人可以利用其细长的身体进入狭窄的空间并爬上障碍物,并且对于检查狭窄的空间以及在灾难现场进行搜索和救援操作非常有效。但是,由于它们具有许多致动器,因此很难控制它们的精确运动。
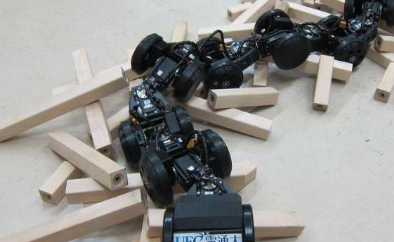
现在,东京电子通信大学的田中元保及其同事提出了控制蛇形机器人以进行三维转向,爬楼梯和操纵物体的方法,并开发了蛇形机器人T 2蛇3。在三维转向中,机器人通过放松关节来跟随周围的地形,然后从机器人的姿势恢复运动。通过这种方法,操作员可以轻松地在不平坦的地形上控制和移动机器人。对于爬楼梯,机器人会在适当的时机自动将其在楼梯上的运动从头到尾转移,因为附着在机器人底部的传感器数据被用来触发运动。为了操纵物体,通过自主选择抬起/着地的车轮的分配来保持适当的姿势,从而控制附着在机器人头部上的抓爪的位置和方向。尽管机器人T 2 Snake-3具有大约30个执行器,但操作员可以使用这些方法和游戏手柄轻松操作机器人。
机器人T 2 Snake-3使用建议的方法进入狭窄的空间,爬上一米高的台阶,爬上楼梯,并旋转阀门。该蛇状机器人是为检验设备和救灾有效控制。
")
")
")
")

")
")
")
")
")
")
")
")
")
")
")