您现在的位置是:首页 >要闻 > 2020-12-07 16:01:47 来源:
人工微游泳的自适应运动
细菌通过响应于局部变化的物理和化学条件而利用力学表现出显着的可塑性。顺从的结构通常会帮助出租车的行为在复杂而结构化的环境中导航。受生物启发的微生物机制包含合理设计的架构,该架构能够进行大的非线性变形,从而将自主权引入工程化的小型设备中。
在最近的一项研究中,HW Huang及其机械工程,应用数学和理论物理系的同事分析了低雷诺数下流体动力和局部流变对游泳的影响。在工作中,他们确定了在运动中使用弹性-流体动力耦合技术开发一套机械设备的挑战性和收益,这些机械设备可以制造具有自律性的不受束缚的微型机器人。在没有板载传感器的情况下,在自适应运动过程中,科学家能够证明人造微游泳者的结构和磁性与流体的动力学特性之间的耦合。结果现已发表在《科学进展》上。
微生物包含多种分子运动的机制,可以有效地导航复杂的环境和生态位。在细菌中,游动由鞭毛,细胞体与血流产生的阻力之间的机械相互作用引起。雷诺数低时的粘滞力会引起流体阻力,而阻力又取决于运动物体的形状。
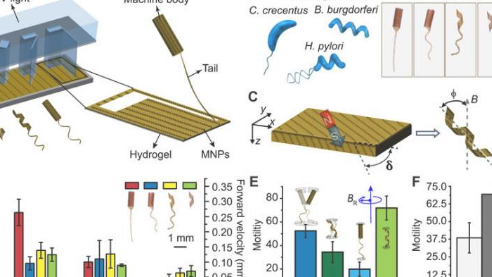
为了优化其运动能力,细菌可以在其生命周期中采用其他形状和大小。除了改变身体形状,细菌还可以使用推进系统在复杂环境中进行高级运动。例如,通过弯曲钩形弯月杆菌可以增强运动能力,而溶藻弧菌由于鞭毛屈曲的不稳定性,在攀登营养梯度中可以胜过多鞭毛大肠杆菌。此外,腐臭希瓦氏菌可以通过鞭毛丝中的多态性转变逃脱物理陷阱。
研究人员通过生物启发式微工程学开发的微观人工游泳器,可通过体液,穿过生物屏障并进入疾病的偏远地区,从而可能彻底改变靶向疗法。在该领域的开拓性工作已经证明了模仿原核或真核鞭毛构建具有不可逆运动的磁控微游泳器的可行性。但是,与活细胞不同,这些机械设备无法感应其局部环境或适应物理条件的变化。控制人造材料可以为构建可调节,持久且强大的工程解决方案铺平道路,例如自主生物混合机器人设备。
")
")
")
")

")
")
")
")
")
")
")
")
")
")
")