您现在的位置是:首页 >要闻 > 2020-12-08 17:00:37 来源:
敏捷的束缚完全软的液体机器人
导读 与传统的刚性机器人相比,软机器人在过去几年中因其独特的特性而备受关注。但是,与电影《大英雄6》中的Baymax不同,先进的软机器人只是实
与传统的刚性机器人相比,软机器人在过去几年中因其独特的特性而备受关注。但是,与电影《大英雄6》中的Baymax不同,先进的软机器人只是实验室中的原型,通常是栓系的,这意味着它需要电线或气动管来供电。为了充分发挥软机器人的潜力,首选无束缚设计。现有的使软机器人具有不受限制的设计的方法通常涉及高能量密度的动力源,这会导致集成问题,否则,机器人将笨重且笨拙,无法携带低能量密度的动力源。
在自然界中,有巨大的生物为了生存而进化了数十亿年。Stenus属的陆栖甲虫是一种陆栖昆虫,生活在水池或溪流附近,当它们偶然掉入水面时,它们会通过分泌化学物质产生表面能梯度而获得一阵动能逸出。这种推进过程通常被称为Marangoni推进,是活物采用的,因此它温和而温和,与柔软的材料完全兼容。
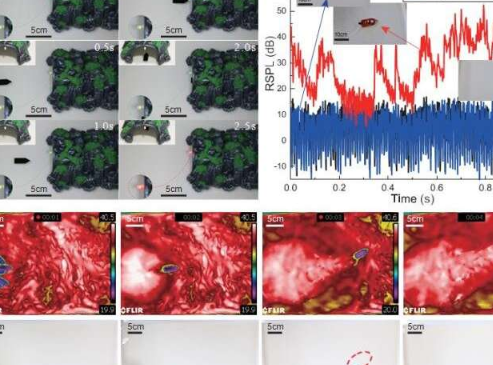
华中科技大学的科学家在发表在北京《国家科学评论》上的一篇新研究文章中,报告了一种不受束缚的完全软的机器人,该机器人在液体中的致动采用了环境能量梯度。通过将环境活性物质(EAM)释放到液体环境中,该机器人可以获得每秒5.5体长的敏捷速度,这比无绳软机器人鱼的最佳报告值高7倍。
“采用这种ß机制会带来一些好处,例如安静,无热疲劳等。” 吴志刚教授说:“更重要的是,驱动和机器人功能实现可以分开补充。设计人员第一次获得了专注于功能实现的机会。这可能使软机器人在某些未涉及的场景中成为可能。在将来。”
")
")
")
")

")
")
")
")
")
")
")
")
")
")
")