您现在的位置是:首页 >要闻 > 2020-12-11 11:26:51 来源:
用于可变形机器人指尖的减摩系统
导读 金泽大学的研究人员最近开发了一种基于润滑效果的减摩系统,该系统可能具有有趣的软机器人应用。在泰勒和弗朗西斯(Taylor&Francis)的Advanc
金泽大学的研究人员最近开发了一种基于润滑效果的减摩系统,该系统可能具有有趣的软机器人应用。在泰勒和弗朗西斯(Taylor&Francis)的Advanced Robotics(高级机器人)杂志上发表的一篇论文中介绍了他们的系统,该系统可以帮助开发可以在干燥和潮湿条件下有效操纵物体的机器人。
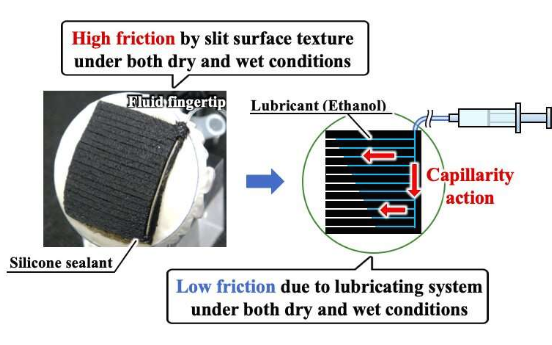
从事这项研究的研究人员之一的渡边哲(Tetsuyou Watanabe)对TechXplore表示:“我们先前开发的柔软机器人手的表面纹理或皮肤在干燥和潮湿条件下都具有很高的摩擦力。” “但是,这种高摩擦力使几种操纵方式(包括释放和滑动)变得困难。在某些情况下,被抓的物体会粘在表面上。为克服此问题,我们开发了一种使用润滑剂的新型减摩擦系统。”
在开发系统时,渡边和他的同事们从人类行为中汲取了灵感。他们观察到,在超市里,人们经常舔手指打开塑料袋或容器。尝试拾纸或翻书时,也会执行类似的操作。
研究人员发现,这种“手指舔”行为在中老年人中尤为常见,因为衰老通常会导致皮肤干燥。另一方面,年轻人在尝试操纵塑料或纸张时通常不需要舔手指,因为他们可以通过身体的出汗机制自动控制皮肤的摩擦。
渡边说:“当然,舔手指的目的是要获得高摩擦力,而这与我们的目的(即减少摩擦)完全不同。” “但是,通常润滑剂的目的是减少机械系统中的摩擦。因此,我们考虑了类似于人的汗液控制的减少摩擦系统的可能性。”
研究人员构建了一个机械指尖,该指尖的表面有缝隙。当润滑剂(例如乙醇)注入这些狭缝的边界周围时,它们会通过毛细作用渗透到整个表面。
渡边说:“我们利用了包括纹理在内的薄表面积,该系统不仅可以在刚性物体上而且可以在可变形物体上工作,而不会失去对物体形状的适应性。” “因此,我们系统的主要优点是可以在保持表面变形性和适应性的同时控制表面摩擦。这意味着开发的系统可以安装在具有软体的机器人上。”
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")