您现在的位置是:首页 >要闻 > 2020-12-16 17:17:13 来源:
基于ToM的机器人仓库人的意图估计算法
物流业务的快速增长催生了对更先进,更高效的仓库系统的需求。机器人技术的进步可以通过使当前由人类完成的任务自动化来帮助满足这些需求,从而大大加快工作流程。
但是,为了安全高效地进行操作,机器人仓库助理应能够识别其操作员的意图。萨格勒布大学和卡尔斯鲁厄理工学院的研究人员最近开发了一种基于心理理论(ToM)原理的人类意图估计算法。ToM是人类识别其他人的意图,信念,欲望,情绪和精神状态的能力。
“我们的研究源自欧盟的Horizon 2020项目SafeLog,该项目旨在允许人类安全进入全自动仓库,在这里,移动机器人可以在不关闭整个机器人团队的情况下就随身携带架子,” David Puljiz说道,进行这项研究的研究人员告诉TechXplore。“这是通过使用专门设计的安全背心和AR设备来指导和帮助工人在这种环境中航行来完成的。”
为了增强安全性,研究人员设计的仓库安全系统规划了机器人的行进路线,以免与人工冲突。为了使其正常工作,它需要知道操作员的去向,特别是如果操作员没有前往事先约定的位置。
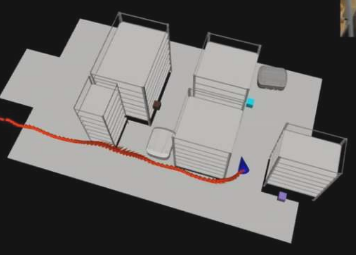
Puljiz和他的同事观察了单个工人在仓库环境中的运动,并使用一种称为基于广义Voronoi图的规划方法对他们的目标位置进行了验证。然后,将这些观察结果输入到隐藏的马尔可夫模型中,该模型可以在工人导航变化的环境时在线估计其意图。
参与这项研究的另一位研究员Tomislav Petkovic对TechXplore表示:“所建议的基于ToM的柔性机器人仓库的人类意图估计算法基于隐马尔可夫模型运动验证。” “我们观察工人的运动,并使用基于广义Voronoi图的路径规划相对于目标位置进行验证。然后,这些观察结果由隐马尔可夫模型框架处理,该模型可在线估计工人的意图并能够处理变化的环境。LAMOR实验室萨格勒布大学的研究人员开发了该算法的后端:运动验证和目标估计。”
为了评估模型的有效性,卡尔斯鲁厄理工学院的IPR实验室使用Microsoft Hololens AR眼镜在小型仓库测试环境中进行了意向评估实验。研究人员使用VR技术在大型虚拟仓库中进行了进一步评估。他们发现,他们的框架可以有效地估计仓库工人的意图,而且精度很高。
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")