您现在的位置是:首页 >要闻 > 2020-12-17 14:19:36 来源:
通过模仿蟑螂的头部来教机器人爬墙
导读 通过模仿蟑螂的头部来教机器人爬墙来自加利福尼亚大学,哈佛大学和宾夕法尼亚州立大学的一组研究人员发现了一种简单的方法,可以让机器人撞
通过模仿蟑螂的头部来教机器人爬墙
来自加利福尼亚大学,哈佛大学和宾夕法尼亚州立大学的一组研究人员发现了一种简单的方法,可以让机器人撞墙时改变飞机的位置(以蟑螂为例),它只是将墙壁的物理形状撞在墙上使它开始向上攀爬。研究人员在“皇家学会接口杂志”上发表了他们的机器人设计论文。
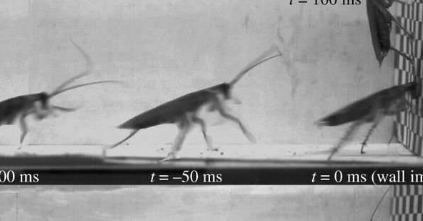
为了在现实世界中自行操作,机器人具有计算机头脑和许多代码,但是有时,研究人员用这种新的努力发现,更容易采用更简单的方法。在蟑螂没有做当它在地板上skittering并符合墙壁它只是猛地头扎入墙,它身体的形状带有其头部和上身向上,而它的腿不停搅动很多思考。这种方法允许蟑螂无需处理即可更换飞机,并且可以一直沿墙运行。它发生的时间很短,仅需75毫秒。
在设计能够爬墙的机器人时,必须考虑从地板到墙壁的过渡-如果分解成多个步骤,则该过程可能会花费硬件和大量代码。但是研究人员想知道他们是否可以设计出一种蟑螂形状的机器人,该机器人可以先撞入墙壁。为了找到答案,他们在实验室拍摄了蟑螂,撞到墙壁上然后向上爬,然后着手设计一个模仿他们发现的机器人。他们决定采用简单的盒形设计-一种小型,轻巧的机器人,适合手掌,它具有锥形鼻子和六个腿,无论发生什么情况都可以不断向前推进。他们进行了几次试验,以微调他们的创作,然后拍摄结果。这是一个非常简单的机器人,可以从水平姿势转变为机器人,
这个小机器人还不能爬墙,但是无需额外的硬件或软件即可完成过渡,这是该过程中至关重要的一步。
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")