您现在的位置是:首页 >要闻 > 2020-12-21 08:32:09 来源:
施工现场机器人随着工具的下降计划的变化而适应
导读 为建筑工地设计的机器人是本周新闻。即,有一个称为原位制造器的机器人。被描述为自主的建筑机器人,人们可以强调自主。IF代表了设计用于建
为建筑工地设计的机器人是本周新闻。即,有一个称为原位制造器的机器人。被描述为自主的建筑机器人,人们可以强调自主。
IF代表了设计用于建筑的机器人技术的重要一步。简而言之,它们被设计为更智能。它们不仅仅是像工厂一样的机器,它们可以站在一起并将物体成堆放置,但经过精心设计,可以四处移动并适应不断变化的情况。
来自路透社的吉姆·德鲁里(Jim Drury)的详细报告集中在瑞士国家研究能力中心(NCCR)数字加工中心的工程师们的想法上。该中心位于苏黎世联邦理工学院>校园。
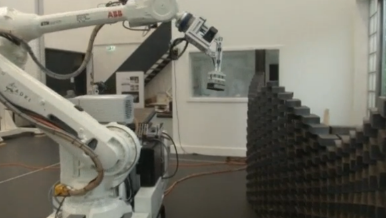
NCCR主任Matthias Kohler教授说,这是第一台真正可以在建筑工地上进行非标准设计的机器。他提到的设计会根据建筑现场的不同而变化。
在预编程的结构中放置砖块并不是其主要功能。传感器和机载计算可帮助其建立3D站点地图。它具有2D激光测距仪,可与构成地图的计算机算法结合使用。
苏黎世联邦理工学院的乔纳斯·布赫利(Jonas Buchli)教授说,船上装有两台计算机,一台用于手臂,一台用于整个机器人。计算机为机器人移动并知道它在哪里计算信息。这就意味着机器人可以在没有帮助的地方四处移动。他们可以自行适应较小的设计变化。
机器人可以适应计划外的情况-放弃建造者的工具,后来进行设计变更。负责这项研究的乔纳斯·布赫利(Jonas Buchli)教授对路透社说,研究中的机器人专家发现建筑工地有趣的环境,“介于工厂或实验室完全规划和控制的环境,以及户外完全混乱的环境之间”。
Buchli说,这是一种半结构化的环境,研究人员可以测试和开发机器人在这种环境中移动并做有用的事情所需的技术。
")





")
")
")
")
")
")
")
")
")
")