猎豹III机器人作为第一响应者的角色准备
如果你要求某人说出21世纪从麻省理工学院出来的新技术,他们很有可能将机器人猎豹命名为。由麻省理工学院机械工程系的仿生机器人实验室在Sangbae Kim副教授的指导下开发,四足动物MIT Cheetah因其动态腿步,速度,跳跃能力和仿生设计而成为头条新闻。
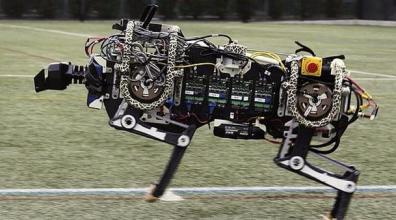
狗大小的猎豹II可以以每秒6.4米的速度在四条铰接腿上运行,可以轻微转动,并跳跃到60厘米的高度。机器人还可以自主确定如何避开或跳过障碍物。
Kim正在开发第三代机器人Cheetah III。Kim没有提高Cheetah的速度和跳跃能力,而是将猎豹转变为商业上可行的机器人,具有更强的有效载荷能力,更宽的运动范围和灵巧的抓握功能。猎豹III最初将作为危险环境中的光谱检测机器人,例如受损的核电站或化工厂。然后它将发展为满足其他紧急响应需求。
“猎豹II专注于高速运动和敏捷跳跃,但不是为了执行其他任务而设计的,”金说。“通过Cheetah III,我们对设计提出了很多实际要求,因此它可以成为一个全能的玩家。它可以做高速运动和强大的动作,但它也可以非常精确。“
仿生机器人实验室也正在完成一个较小的,精简版的猎豹,称为Mini Cheetah,专为机器人研究和教育而设计。其他项目包括名为Hermes的远程操作人形机器人,为人类操作员提供触觉反馈。此外,还有一项早期阶段的调查,即采用类似猎豹的执行器技术来解决残疾人和老年人的移动性挑战。
征服土地上的流动性
“通过猎豹项目,我最初的动机是复制陆地动物,但我也意识到地面移动性存在差距,”金说。“我们已经征服了空运和水运,但我们还没有征服地面机动性,因为我们的技术仍然依赖于人工铺设的道路或铁路。我们的运输技术都不能可靠地在自然地面上行驶,甚至没有楼梯和路缘石的人造环境。动态腿式机器人可以帮助我们克服地面上的移动性。“
有腿系统的一个挑战是它们“需要高扭矩执行器”,Kim说。“人体髋关节可以产生比跑车更大的扭矩,但在机器人中实现这种压缩的高扭矩驱动是一个巨大的挑战。”
Kim说,机器人倾向于以牺牲速度和灵活性为代价来实现高扭矩。工厂机器人使用高扭矩执行器,但它们是刚性的,并且在爬升步骤产生的冲击下不能吸收能量。液压驱动的动态腿式机器人,例如Boston Dynamics的更大,更高负载,四足动物的Big Dog,可以实现非常高的力和动力,但却牺牲了效率。“效率是液压系统的一个严重问题,特别是当你快速移动时,”他补充道。
猎豹项目的主要目标是创造能够在模仿动物肌肉同时实现效率的设计中产生高扭矩的致动器。为了实现这一目标,Kim选择了电动执行器而不是液压执行器。“我们的高扭矩电动机已超过生物肌肉动物的效率,并且比液压机器人更高效,更便宜,更快,”他说。
猎豹III:不仅仅是一个speedster
与早期版本不同,Cheetah III设计更多地受到潜在应用的推动,而非纯粹的研究。Kim和他的团队研究了应急机器人的要求并向后工作。
“我们相信猎豹III将能够在两到三年内在辐射发电厂中航行,”金说。“在五到十年内,它应该能够做更多的体力劳动,例如通过切割碎片并将它们带出来拆卸发电厂。在15至20年内,它应该能够进入建筑物火灾并可能挽救生命。“
在福岛核灾难等情况下,机器人或无人机是侦察的唯一安全选择。无人机比机器人有一些优势,但它们不能施加开门等任务所需的大部队力量,并且在许多灾难情况下,落下的碎片会阻止无人机飞行。
相比之下,猎豹III可以将人类的力量一次施加到环境中几个小时。它通常可以爬上或跳过碎片,甚至可以将它移开。Kim说,与无人机相比,机器人更容易仔细检查仪器,翻转开关和按钮。“猎豹III可以测量温度或化合物,或关闭和打开阀门。”
跟踪机器人的优势包括能够操纵碎片和爬楼梯。“楼梯是机器人的一大障碍,”金说。“我们认为有腿机器人在人造环境中表现更好,特别是在有更多障碍的灾难情况下。”
与猎豹II相比,猎豹III的速度有所放缓,同时也提供了更大的力量和灵活性。“我们增加了扭矩,因此可以打开发电厂的重型门,”金说。“我们通过使用可以清晰地表达身体和四肢的12个电动马达,将运动范围增加到12个自由度。”
这远远不足以拥有600多块肌肉的动物的灵活性。然而,猎豹III可以通过其他技术进行一些补偿。“我们最大化每个关节的工作空间,以达到合理的可达性,”金说。
该设计甚至可以使用腿部进行操纵。“通过利用四肢的灵活性,猎豹III可以用一条腿打开门,”金说。“它可以站立在三条腿上,并为第四肢配备一个定制的可更换的手来打开门或关闭一个阀门。”
猎豹III具有改进的有效载荷能力,可以携带更重的传感器和摄像机,甚至可能为残疾受害者提供物资。然而,从拯救它们还有很长的路要走。猎豹III仍然限制在20公斤的有效载荷上,并且可以以最小的有效载荷不受限制地行进四到五个小时。
“最终,我们希望开发一种可以拯救一个人的机器,”金说。“我们不确定机器人是否会携带受害者或携带携带装置,”他说。“我们目前的设计至少可以看出是否有任何受害者,或者是否有更多潜在的危险事件。”
尝试人机交互
半自主的猎豹III可以自行制定走动和导航决策。但是,对于灾害工作,它主要通过远程控制进行操作。
“完全自主的检查,尤其是灾难应对检查,将非常困难,”金说。在其他问题中,自主决策通常需要时间,并且可能涉及反复试验,这可能会延迟响应。
“人们将控制猎豹III的高水平,提供帮助,但不处理每一个细节,”金说。“人们可以告诉它去地图上的特定位置,找到这个地方,并打开那扇门。当谈到手部动作或操纵时,人类将接管更多控制并告诉机器人使用什么工具。“
人类也可以协助更多的本能控制。例如,如果猎豹使用其中一条腿作为手臂然后施加力,则很难保持平衡。Kim正在调查人类操作员是否可以使用“平衡反馈”来保持猎豹在施加全力时不会摔倒。
“即使站在两三条腿上,它仍然能够执行需要复杂平衡的高强度动作,”金说。“操作人员可以感受到平衡,并帮助机器人改变动力,产生更大的力来打开或敲门。”
仿生机器人实验室正在与另一个名为Hermes(高效机器人机制和机电系统)的机器人项目探索平衡反馈。与Cheetah III一样,它是一个完全铰接的动态腿式机器人,专为灾难响应而设计。然而,爱马仕是两足动物,完全由一个戴着远程呈现头盔和全身套装的人进行远程操作。与爱马仕一样,该套装配有传感器和触觉反馈装置。
“运营商可以通过使用体重或直接实施更多力量来感知平衡状况并作出反应,”金说。
使用Wi-Fi很难实现这种亲密实时反馈所需的延迟,即使它没有被墙壁,距离或无线干扰阻挡。“在大多数灾难情况下,你需要某种有线通信,”金说。“最终,我相信我们会使用增强型光纤。”
改善老年人的流动性
除了灾难响应之外,Kim还设想了敏捷,动态腿式机器人在医疗保健方面的重要作用:改善快速增长的老年人口的流动性。众多机器人项目正在通过健谈的社交机器人瞄准老年人市场。金正在想象一些更基本的东西。
“我们仍然没有一种技术可以帮助受损或老年人无缝地从床上移动到轮椅上,然后再回到车上,”金说。“很多老人起床和爬楼梯都有问题。例如,一些有膝关节问题的老人在平地上仍然很漂亮,但无法独自爬下楼梯。这只是他们需要帮助的那一天的一小部分。所以我们正在寻找一些重量轻,易于使用的短期帮助。“
他说,Kim目前致力于“创造一种可以使执行器安全的技术”。“我们在猎豹中使用的电动执行器已经比其他机器更安全,因为它们可以轻松吸收能量。大多数机器人都很僵硬,这会造成很大的冲击力。我们的机器给了一点。“
通过将这种安全的执行器技术与一些Hermes技术相结合,Kim希望开发出一种可以帮助老年人的机器人。“机器人不仅可以解决老年人护理的预期劳动力短缺问题,还可以解决保持隐私和尊严的需要,”他说。
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!
-
试驾极狐阿尔法S(ARCFOX αS)是一次令人印象深刻的体验。从咨询开始,品牌的专业客服迅速回应了我的疑问,...浏览全文>>
-
如果您想预约哈弗猛龙的试驾体验,可以按照以下步骤快速在4S店完成预约:首先,您可以通过哈弗汽车的官方网站...浏览全文>>
-
如果您想体验零跑汽车的试驾服务,可以通过以下步骤在4S店快速预约:首先,访问零跑汽车的官方网站或通过其官...浏览全文>>
-
试驾奔驰迈巴赫S级的预约流程简单清晰,以下是具体步骤:首先,访问奔驰官方网站或联系当地授权经销商。在网站...浏览全文>>
-
纳米01试驾流程通常包括以下几个步骤:第一步:预约试驾用户可以通过品牌官网、4S店或电话预约试驾。提前预约...浏览全文>>
-
奔腾B70是一款集时尚设计与卓越性能于一身的中型轿车,近期有幸对其进行了一次深度试驾。这款车型不仅外观大气...浏览全文>>
-
想要快速预约福特蒙迪欧的试驾体验驾驶乐趣?以下是一些简单步骤帮助您轻松完成:首先,访问福特官网或通过福...浏览全文>>
-
大众试驾,轻松搞定试驾想要深入了解一款车的性能与驾驶感受?试驾是最佳选择!无论是追求操控感的运动型轿车...浏览全文>>
-
试驾现代胜达时,您需要满足一些基本条件以确保安全和顺利的体验。首先,您必须持有有效的驾驶证,并且驾龄通...浏览全文>>
-
小鹏G7是一款备受关注的智能电动车,对于新手来说,试驾前需要了解一些关键步骤和注意事项,确保安全且充分体...浏览全文>>
- 哈弗猛龙预约试驾,如何在4S店快速预约?
- 零跑汽车试驾,如何在4S店快速预约?
- 江淮iEV7试驾预约预约流程
- 试驾MG4 EV全攻略
- 奥迪SQ5 Sportback预约试驾,线上+线下操作指南
- 全顺试驾预约,一键搞定,开启豪华驾驶之旅
- 魏牌预约试驾全攻略
- 试驾零跑汽车零跑C01,畅享豪华驾乘,体验卓越性能
- 试驾哈弗H6操作指南
- 零跑T03试驾,畅享豪华驾乘,体验卓越性能
- 菱势汽车预约试驾,轻松搞定试驾流程
- MINI试驾,线上+线下操作指南
- 试驾沃尔沃XC60,从预约到试驾的完美旅程
- 试驾QQ多米,畅享豪华驾乘,体验卓越性能
- 试驾丰田汉兰达,一键搞定,开启豪华驾驶之旅
- 力帆预约试驾,一键搞定,开启豪华驾驶之旅
- 阿维塔12预约试驾,4S店体验全攻略
- 试驾江铃E路顺V6,简单几步,开启完美试驾之旅
- 灵悉L试驾预约,如何享受4S店的专业服务?
- 极氪7X试驾,如何享受4S店的专业服务?