您现在的位置是:首页 >人工智能 > 2021-04-25 16:32:12 来源:
这款柔软的机械臂为研究海洋中最精致的生物而设计
机器人手臂无法模仿人类拥抱的温暖拥抱。从火星探测器到海底探险者,机器人手臂通常专注于实用性的抓取问题。但这种僵硬带来了一些令人不快的缺点,这就是为什么哈佛大学,巴鲁克学院和罗德岛大学的工程师为需要处理更敏感材料的海底机器人建造了一系列软机器人夹具的原因。
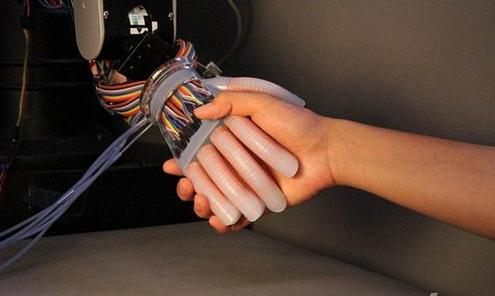
使用带有无线传感器的手套,科学家们可以控制一种新的,独特的模块化软机器人“手臂”,即使是最精细的水生生物也可以抓取并采集样品。
“这款新型软机械臂取代了大多数潜水器上标准的坚硬,坚固的手臂,使我们的软机器人手柄能够在各种环境中更轻松地到达并与海洋生物互动,并让我们探索海洋的一部分目前尚未得到充分理解,“URI助理教授Brennan Phillips在一份新闻声明中说。
“使用[海底机器人手臂]就像试图拿起带有金属蟹爪的餐巾纸一样。”
由菲利普斯和团队其他成员建造的手臂为有进取心的科学家提供了各种运动选择。它是可定制的,具有弯曲,旋转和夹紧模块,可以根据科学任务的需要轻松互换。该系统所需的功率不到当前机器人手臂的一半,值得注意,因为许多海底探险者依靠电池供电。
“目前可用的海底机器人手臂适用于石油和天然气勘探,但不适用于处理微妙的海洋生物 - 使用它们就像试图拿起带有金属蟹爪的餐巾纸一样,” 纸张合着者David Gruber博士说。 D.,巴鲁克学院生物学教授。“手套控制系统让我们可以更直观地控制软机械臂,就像我们在SCUBA潜水时移动自己的手臂一样。”
通过佩戴无线控制手套,用户可以通过卷曲食指来控制机器人通过手腕运动及其夹具的弯曲。这种卷曲和摇晃传递到机器人,在那里运动转化为系统的海水动力液压发动机中的开关阀。它可以处理从脆珊瑚到软海蜇的各种物品。
该团队在巴西Fernando de Noronha Archipelago海底生态系统的潜艇中测试了这只手臂。Phillips和Gruber在中水和深海之间移动,能够处理各种生物,如玻璃海绵,海参,分枝珊瑚,甚至自由漂浮的生物发光被囊。
该部门的下一步将是扩大其科学测试能力。目标是允许非侵入性DNA和RNA采样功能。这将允许研究人员抓住有机体,在其自然栖息地中研究它,然后轻轻地将其释放回野外。
海洋令人惊讶的电子化与机械巨头准备开采矿物或其他机器人,旨在模仿周围的动物群。现在科学有一个机器人可以通过更敏感的触摸涉水。
")









")
")
")
")
")
")
")
")
")