您现在的位置是:首页 >人工智能 > 2021-05-03 20:56:49 来源:
飞行和驾驶的四轴飞行器系统提出了另一种开发飞行汽车的方法
能够步行和乘坐飞行是典型的自然 - 许多鸟类,昆虫和其他动物可以做到这两点。如果我们可以对具有类似多功能性的机器人进行编程,它将开辟许多可能性:想象一下机器可以飞入建筑区域或不靠近道路的灾区,然后挤过地面上的狭小空间来运输物体或救援人员。
问题是,擅长一种运输方式的机器人通常对另一种运输方式不好。机载无人机速度快,灵活,但通常电池寿命太短,无法长途旅行。另一方面,地面车辆更节能,但速度更慢,移动性更低。
麻省理工学院计算机科学与人工智能实验室(CSAIL)的研究人员的目标是开发能够在陆地上进行机动并带到天空的机器人。在一篇新论文中,该团队展示了一个由八个四轴飞行器无人机组成的系统,它可以飞行并穿过类似城市的环境,包括停车位,禁飞区和着陆垫。
该论文的第一作者,博士生Brandon Araki说,飞行和驾驶的能力在有很多障碍的环境中很有用,因为你可以飞越地面障碍物并在头顶障碍物下行驶。普通无人机根本无法在地面上操纵。带轮子的无人机更具移动性,同时飞行时间略有减少。
Araki和CSAIL主任Daniela Rus与麻省理工学院的本科学生John Strang,Sarah Pohorecky和Celine Qiu以及苏黎世联邦理工学院高级互动技术实验室的Tobias Naegeli一起开发了该系统。该团队于本月早些时候在新加坡举行的IEEE国际机器人与自动化会议(ICRA)上展示了他们的系统。
这个怎么运作
该项目建立在Araki先前开发的飞猴机器人的基础上,该机器人可以爬行,抓取和飞行。虽然猴子机器人可以跳过障碍物并爬行,但仍然无法自主旅行。
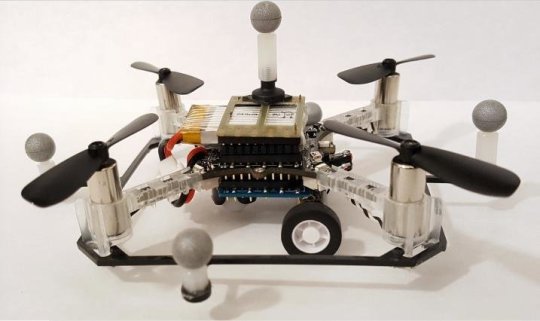
为了解决这个问题,该团队开发了各种路径规划算法,旨在确保无人机不会发生碰撞。为了使它们能够驾驶,该团队在每架无人机的底部放置了两个带轮子的小型电动机。在模拟中,机器人可以在电池耗尽之前飞行90米或行驶252米。
将驱动组件添加到无人机中会略微缩短其电池寿命,这意味着它可以飞行的最大距离减少了14%到大约300英尺。但由于驾驶仍然比飞行更有效,因此驾驶效率的提高超过了由于额外重量而导致飞行效率相对较小的损失。
Rutgers大学的计算机科学教授Jingjin Yu表示,这项工作为大规模混合模式运输提供了一种算法解决方案,并显示其对现实世界问题的适用性。
该团队还使用日常材料测试系统,例如道路用布料和建筑物纸板箱。他们测试了8个机器人在无碰撞路径上从起点导航到终点,并且都成功了。
罗斯表示,像他们这样的系统表明,制造安全有效的飞行汽车的另一种方法不是简单地在汽车上放置机翼,而是建立多年来为无人机增加驾驶能力的研究。
Rus说,随着我们开始为飞行汽车开发规划和控制算法,我们对能够以小规模创造具有这些功能的机器人的能力感到鼓舞。虽然扩大到可以实际运输人类的车辆显然仍然面临巨大的挑战,但我们的灵感来自未来的潜力,飞行汽车可以为我们提供快速,无交通的运输。
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")