您现在的位置是:首页 >人工智能 > 2021-05-03 22:02:20 来源:
生物灵感的眼睛稳定了机器人的飞行
位于Etienne-Jules Marey的科学研究所(CNRS / Aix-MarseilleUniversité)的Biorobotics研究人员开发出了第一个能够在不平坦地形上飞行的航空机器人,这种机器人在没有加速度计的情况下在视觉上稳定。它被称为BeeRotor,它可以通过受昆虫视觉启发的光学流量传感器调节速度并避开障碍物。它可以沿着隧道飞行,不均匀的移动墙壁,无需测量速度或高度。
从无人机到阿丽亚娜发射器的所有飞机目前都配备了惯性测量装置,包括加速度计。这使得这些飞机能够相对于地平线或相对于其垂直方向稳定它们的滚转和俯仰:地球中心的方向。加速度计测量飞机的所有加速度,包括重力,其总是指向地球的中心。然而,这个必不可少的工具在昆虫中没有等同物,如果没有这些信息,它们会非常幸福
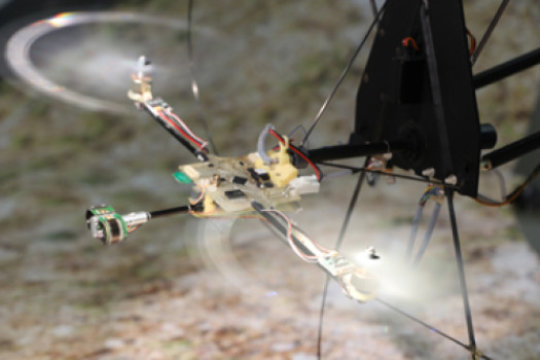
因此,研究人员Fabien Expert和Franck Ruffier从有翼昆虫中汲取灵感,创造了BeeRotor,这是一种系留飞行机器人1,它首次能够调整速度,无需加速度计即可跟踪地形,无需测量速度或高度。它的重量为80克,长度为47厘米,它可以单独避开带有移动墙的隧道中的垂直障碍物。为了实现这一目标,研究人员模仿了昆虫在飞行时使用过往景观的能力。这被称为光流,在沿高速公路行驶时可以很容易地观察到其原理:前方的视野相当稳定,但从两侧向外看,景观越过越快,以一定角度达到最大值与车辆的路径成90度。
为了测量光学流量,BeeRotor配备了仅在其眼睛顶部和底部分布的24个光电二极管(或像素)。这使它能够检测环境中的对比度以及它们的运动。与昆虫一样,风景中的特征从一个像素移动到另一个像素的速度提供了流动的角速度。当流量增加时,这意味着机器人的速度也在增加,或者相对于障碍物的距离正在减小。
通过大脑,BeeRotor有三个反馈回路2,它们作为三种不同的反射,直接利用光流。第一个反馈回路使其改变其高度,以便跟随地板或屋顶。第二个控制机器人的速度,以使其适应它飞过的隧道的大小。第三个环路使用专用电机使眼睛相对于局部斜率稳定。这使得机器人能够始终获得最佳视野,而与其俯仰程度无关。因此,BeeRotor可以避免非常陡峭的障碍,没有加速度计,也没有测量速度或高度。2013年底,该技术获得了专利。
有了BeeRotor,因此有可能提出一个新的,生物学合理的假设来解释昆虫如何在没有加速度计的情况下飞行:由于类似于机器人使用的反馈回路,有翼昆虫可以使用来自光流的提示保持稳定。
这个世界首先也有工业应用。加速度计以及包含它们的惯性参考系统3对于非常小的机器人而言太重且太笨重。质量约为1克,它们不适用于重约10克的机器人,例如可用于检查管道。航天工业也需要轻盈,每公斤送入太空需要相当大的成本。在不必替换加速度计的情况下,光学流量传感器可用作太空任务4发生故障时的超轻型备用系统。
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")