植入式微型机器人:创新的制造平台制造复杂的生物相容性微机械
由哥伦比亚工程公司的生物医学工程教授Sam Sia领导的一个研究小组已经开发出一种用生物材料制造微型尺寸机器的方法,这种机器可以安全地植入体内。使用水凝胶,这是工程师已经研究了数十年的生物相容性材料,Sia发明了一种新技术,将软材料层叠在一起,制造出具有三维自由移动部件的设备。该研究于2017年1月4日在线发表于Science Robotics,展示了Sia称之为“可植入微机电系统”(iMEMS)的快速制造方法。
通过利用水凝胶的独特机械性能,研究人员开发了一种“锁定机构”,用于精确驱动和自由移动部件的运动,可提供阀门,歧管,转子,泵和药物输送等功能。他们能够在广泛的机械和扩散性能范围内调整生物材料,并在植入后控制它们,而无需持续供电,如有毒电池。然后,他们测试了骨癌模型中的“有效负载”递送,发现在10天内触发多柔比星从装置中释放显示出高的治疗效果和低毒性,为标准全身化疗剂量的1/10。
“总体而言,我们的iMEMS平台能够开发具有各种复杂移动组件的生物相容性可植入微器件,可以按需无线控制并解决器件供电和生物相容性问题,”Sia说,他也是数据科学研究所的成员。“我们对此感到非常兴奋,因为我们已经能够将生物材料世界与复杂,精细的医疗设备连接起来。我们的平台有很多潜在的应用,包括我们论文中展示的给药系统,与为精准医学提供量身定制的药物剂量有关。“
大多数现有的可植入微器件具有静态部件而不是移动部件,并且因为它们需要电池或其他有毒电子器件,所以具有有限的生物相容性。Sia的团队花了八年多的时间研究如何解决这个问题。“水凝胶难以使用,因为它们柔软且与传统加工技术不兼容,”与Sia合作的研究的第一作者Sau Yin Chin说。“我们调整了机械性能,并仔细地匹配了设备内相互接触的结构的刚度。互锁的齿轮必须是刚性的,以便允许力传递并承受反复的驱动。相反,形成的结构锁定机构必须柔软且有弹性,以允许齿轮在致动期间由它们滑动,同时,当装置未被致动时,它们必须足够坚硬以将齿轮保持在适当位置。我们还研究了水凝胶的扩散性质,以确保负载的药物不易扩散通过水凝胶层。“
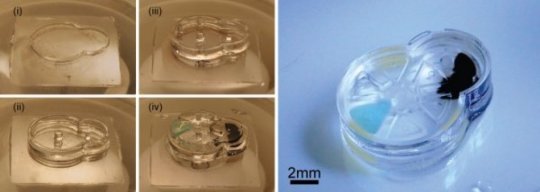
该团队使用光来聚合凝胶片,并采用步进机械化来控制z轴并逐层图案化片材,赋予它们三维性。控制z轴使研究人员能够在水凝胶的一层内创建复合结构,同时在整个制造过程中管理每层的厚度。他们能够堆叠多个精确对齐的层,因为它们可以一次聚合一层,一个接一个地复合,复杂的结构在30分钟内建成。
Sia的iMEMS技术解决了构建生物相容性微器件,微机械和微机器人的几个基本考虑因素:如何在不使用有毒电池的情况下为小型机器人设备供电,如何制造非生物相容性的小型生物相容性可移动组件,以及如何无线通信一次植入(射频微电子学需要功率,相对较大,并且不具有生物相容性)。研究人员能够触发iMEMS设备在植入后数天到数周内释放额外的有效载荷。它们还能够通过使用磁力来实现精确致动,从而引起齿轮运动,进而弯曲由具有高度可调特性的水凝胶制成的结构梁。
该团队在研究期间与哥伦比亚大学医学中心的整形外科医生Francis Lee合作,测试了骨癌小鼠的给药系统。iMEMS系统在癌症附近进行化疗,并且限制肿瘤生长,同时显示出比在整个身体中施用的化学疗法更低的毒性。
“这些微型组件可用于微机电系统,适用于从药物输送到导管到心脏起搏器和软机器人等大型设备,”Sia说。“人们已经在制造替换纸巾,现在我们可以生产小型植入式设备,传感器或机器人,我们可以通过无线方式进行通信。我们的iMEMS系统可以使该领域更接近开发可以安全地与人类和其他人交互的软微型机器人生活系统。“
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!
-
试驾极狐阿尔法S(ARCFOX αS)是一次令人印象深刻的体验。从咨询开始,品牌的专业客服迅速回应了我的疑问,...浏览全文>>
-
如果您想预约哈弗猛龙的试驾体验,可以按照以下步骤快速在4S店完成预约:首先,您可以通过哈弗汽车的官方网站...浏览全文>>
-
如果您想体验零跑汽车的试驾服务,可以通过以下步骤在4S店快速预约:首先,访问零跑汽车的官方网站或通过其官...浏览全文>>
-
试驾奔驰迈巴赫S级的预约流程简单清晰,以下是具体步骤:首先,访问奔驰官方网站或联系当地授权经销商。在网站...浏览全文>>
-
纳米01试驾流程通常包括以下几个步骤:第一步:预约试驾用户可以通过品牌官网、4S店或电话预约试驾。提前预约...浏览全文>>
-
奔腾B70是一款集时尚设计与卓越性能于一身的中型轿车,近期有幸对其进行了一次深度试驾。这款车型不仅外观大气...浏览全文>>
-
想要快速预约福特蒙迪欧的试驾体验驾驶乐趣?以下是一些简单步骤帮助您轻松完成:首先,访问福特官网或通过福...浏览全文>>
-
大众试驾,轻松搞定试驾想要深入了解一款车的性能与驾驶感受?试驾是最佳选择!无论是追求操控感的运动型轿车...浏览全文>>
-
试驾现代胜达时,您需要满足一些基本条件以确保安全和顺利的体验。首先,您必须持有有效的驾驶证,并且驾龄通...浏览全文>>
-
小鹏G7是一款备受关注的智能电动车,对于新手来说,试驾前需要了解一些关键步骤和注意事项,确保安全且充分体...浏览全文>>
- 哈弗猛龙预约试驾,如何在4S店快速预约?
- 零跑汽车试驾,如何在4S店快速预约?
- 江淮iEV7试驾预约预约流程
- 试驾MG4 EV全攻略
- 奥迪SQ5 Sportback预约试驾,线上+线下操作指南
- 全顺试驾预约,一键搞定,开启豪华驾驶之旅
- 魏牌预约试驾全攻略
- 试驾零跑汽车零跑C01,畅享豪华驾乘,体验卓越性能
- 试驾哈弗H6操作指南
- 零跑T03试驾,畅享豪华驾乘,体验卓越性能
- 菱势汽车预约试驾,轻松搞定试驾流程
- MINI试驾,线上+线下操作指南
- 试驾沃尔沃XC60,从预约到试驾的完美旅程
- 试驾QQ多米,畅享豪华驾乘,体验卓越性能
- 试驾丰田汉兰达,一键搞定,开启豪华驾驶之旅
- 力帆预约试驾,一键搞定,开启豪华驾驶之旅
- 阿维塔12预约试驾,4S店体验全攻略
- 试驾江铃E路顺V6,简单几步,开启完美试驾之旅
- 灵悉L试驾预约,如何享受4S店的专业服务?
- 极氪7X试驾,如何享受4S店的专业服务?