您现在的位置是:首页 >人工智能 > 2022-06-02 16:01:51 来源:
能够感受疼痛的人造皮肤可能会导致新一代触敏机器人
可以从感觉“疼痛”中学习的电子皮肤可以帮助创造具有人类敏感性的新一代智能机器人。格拉斯哥大学的一组工程师开发了一种基于“突触晶体管”的新型处理系统的人造皮肤,该系统模仿大脑的神经通路以进行学习。使用智能皮肤的机械手表现出非凡的学习对外部刺激做出反应的能力。
在今天发表在《科学机器人》杂志上的一篇新论文中,研究人员描述了他们如何构建他们的原型计算电子皮肤( e-skin ),以及它如何改进当前触敏机器人技术。
几十年来,科学家们一直致力于制造具有触觉敏感性的人造皮肤。一种被广泛探索的方法是在电子皮肤表面分布一系列接触或压力传感器,以使其能够检测到它何时与物体接触。
然后将来自传感器的数据发送到计算机进行处理和解释。传感器通常会产生大量数据,这些数据可能需要时间才能得到正确处理和响应,从而引入延迟,从而降低皮肤在现实世界任务中的潜在有效性。
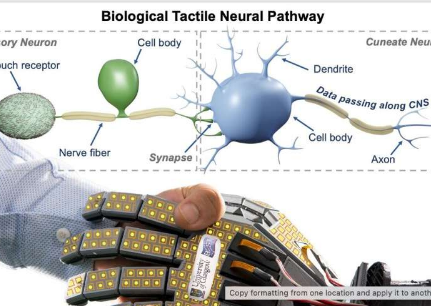
格拉斯哥团队的新型电子皮肤从人类周围神经系统如何解释来自皮肤的信号中汲取灵感,以消除延迟和功耗。
一旦人体皮肤接收到输入,周围神经系统就会在接触点开始处理它,在将其发送到大脑之前将其简化为仅重要信息。感觉数据的减少允许有效使用将数据发送到大脑所需的通信通道,然后大脑几乎立即做出反应,让身体做出适当的反应。
为了构建一种能够进行高效计算、类似突触反应的电子皮肤,研究人员将由 168 个由氧化锌纳米线制成的突触晶体管组成的网格直接打印到柔性塑料表面的表面上。然后,他们将突触晶体管与存在于全关节的人形机器人手掌上的皮肤传感器连接起来。
当传感器被触摸时,它会记录其电阻的变化——微小的变化对应于轻微的触摸,而较重的触摸会产生较大的电阻变化。该输入旨在模仿感觉神经元在人体中的工作方式。
在早期的电子皮肤中,输入数据将被发送到计算机进行处理。取而代之的是,内置在皮肤中的电路充当人工突触,将输入降低为简单的电压尖峰,其频率根据施加在皮肤上的压力水平而变化,从而加快反应过程。
该团队使用该电压尖峰的不同输出来教导皮肤对模拟疼痛的适当反应,这将触发机器人手做出反应。通过设置一个输入电压阈值以引起反应,该团队可以使机器人的手从手掌中心的尖锐刺拳中后退。
换句话说,它学会了通过模拟人类神经系统如何工作的机载信息处理过程来摆脱模拟不适的来源。
电子皮肤的开发是由 Ravinder Dahiya 教授领导的格拉斯哥大学可弯曲电子和传感技术 (BEST) 小组在柔性、可拉伸印刷表面方面的最新突破。
该大学詹姆斯瓦特工程学院的 Dahiya 教授说:“我们都在生命的早期就学会了对疼痛等意外刺激做出适当的反应,以防止我们再次伤害自己。当然,这种新形式的发展正如我们所知,电子皮肤并没有真正涉及造成疼痛——它只是解释从外部刺激中学习的过程的一种简写方式。
“通过这个过程,我们能够创造出一种能够在硬件层面进行分布式学习的电子皮肤,它不需要在采取行动之前将消息来回发送到中央处理器。相反,它极大地加速了通过减少所需的计算量来响应触摸的过程。
“我们相信,这是我们朝着创造能够对刺激做出适当反应的大规模神经形态印刷电子皮肤的工作迈出的真正一步。”
BEST 小组成员、论文合著者刘丰元补充说:“未来,这项研究可能成为更先进的电子皮肤的基础,使机器人能够以新的方式探索和与世界互动。方式,或制造能够接近人类触觉敏感度的假肢。”
该团队的论文题为“基于印刷突触晶体管的电子皮肤让机器人感受和学习”,发表在《科学机器人》杂志上。
")


")


")



")
")
")
")
")
")
")
")
")