您现在的位置是:首页 >人工智能 > 2022-07-27 16:55:15 来源:
学习使用触觉反馈来区分布料层
导读 布料操作是机器人技术中一个具有挑战性的研究领域。然而,目前的方法很多都集中在自上而下地抓住一块布。这种抓握对于某些任务可能无效,例
布料操作是机器人技术中一个具有挑战性的研究领域。然而,目前的方法很多都集中在自上而下地抓住一块布。这种抓握对于某些任务可能无效,例如从一堆布料中挑选所需数量的层。
因此,arXiv.org最近的一篇论文探讨了基于磁力计的触觉传感在可变形布料操作中的应用。特别是,研究人员专注于抓取和提升堆叠的布料层。
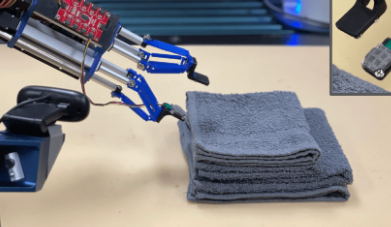
提出了一个由7自由度臂、夹具和夹具手指上的传感器组成的机器人系统。研究人员介绍了一种训练程序,其中触觉分类器用作抓取策略的反馈。实验结果表明,这些简单的方法能够成功地完成抓取所需数量的布料层的任务。
布匹机器人操作的应用范围从织物制造到处理毯子和衣物。布料操作对机器人来说具有挑战性,这主要是因为它们在折叠或皱褶配置中具有高自由度、复杂的动力学和严重的自闭塞。先前关于机器人操作布料的工作主要依赖于视觉传感器,这可能对细粒度的操作任务构成挑战,例如从一堆布料中抓取所需数量的布料层。在本文中,我们建议使用触觉传感进行布料操作;我们将触觉传感器(ReSkin)连接到Franka机器人的两个指尖之一,并训练分类器来确定机器人是否抓取特定数量的布料层。在测试时间的实验中,机器人使用这个分类器作为其策略的一部分,使用触觉反馈来抓取一层或两层布料,以确定合适的抓取点。
")


")


")



")
")
")
")
")
")
")
")
")